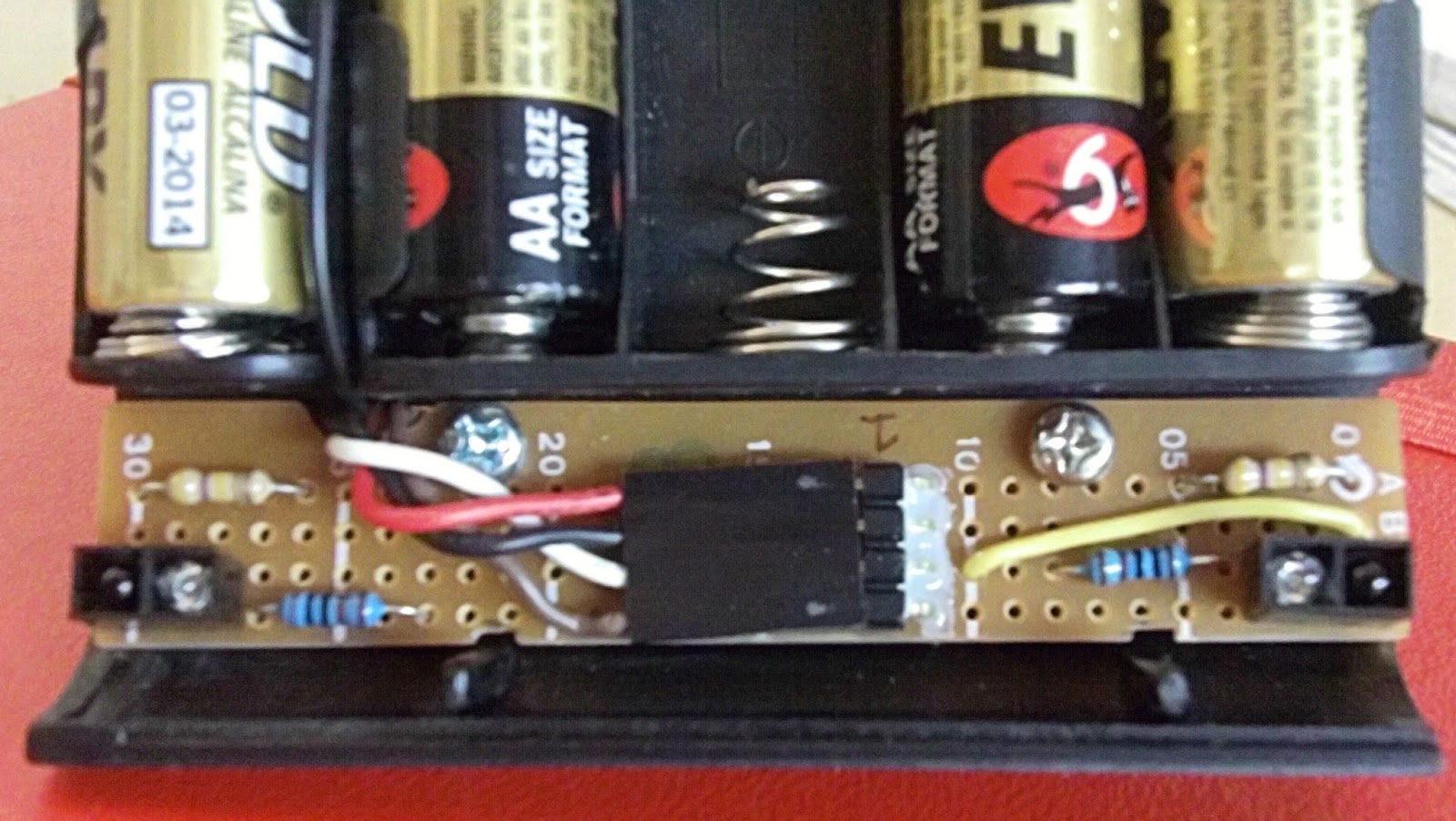
PIC 16F628 on the left, SN754410 on the right, LP2950 top right, ICSP top left, line sensor header bottom left, motor header bottom right
The main board of pennybot would consist of the following:
* PIC 16F628 microcontroller
* SN 754410 motor driver
* 5V power supply based around a LP2950
* connector pins for the motors, line sensor board, batteries, ICSP and IR sensor board
Lots to do and board space was limited so planning was needed. A couple of hours shuffling components around and I had what I thought was a layout that would work. Starting with the easy bits all the headers and IC chip sockets were soldered in first. With that taking a couple of hours I started to remember how long it takes to put freeform circuit boards together from scratch.
The power supply was next. This was also a major deviation from my original design. Due to space and layout I moved the cutout switch in the circuit and deleted the filtering capacitor on the raw power line. I also made some brain errors and kept making circuit hookups that meant the cutout switch didn't break the circuit. Don't solder when tired! I also had a false error in that when the cutoff switch was activated, I was still getting 5V. However this was because at that stage I had lots of capacitors and no components to use up the stored charge. The circuit was being cut but with nothing consuming power it takes awhile (minutes) for 5V to dissipate. Always have at least a single led to drain out power.
Then it was a slow and steady task of connecting up everything else as per the schematic. I did the Pic first so I could test the ICSP and make sure that was working before going further. Whenever I'm wiring things up I like to do a small amount, test for short circuits, test functionality and then go onto the next item. Trying to troubleshoot an entire board with everything soldered is just a recipe for tears.
For the connector to the IR board I used a 8 pin female header. This header would double as the mounting socket too. For the connection to power I decided to solder on the wires to the main board directly, rather than use a removable cable. The connector would be on the chassis in the form of a female header recessed flush into the base plate. To strengthen the connection I glued with two part epoxy the power wires on the main board. I also epoxied the right angle header pins used for the motor and line sensor connections. Anything that would be frequently connected and disconnected needed some extra support.
For the most part things went well. Another change that was made was the pull up resistor on pin RA4. Originally this was 4.7K but that made the dual colour led very dim (with the red barely visible). I dropped this to 1K. I had never done this part of the design on the breadboard as I had used the dual colour leds as motor substitutes. Always breadboard exactly what you are going to wire up.